天富平台张统一院士和孙升研究员课题组近日在机械工程领域顶级期刊《International Journal of Mechanical Sciences》上发表了机器学习辅助软体机器人设计的最新研究成果(“Machine learning-assisted shape morphing design for soft smart beam”🚣🏿♀️,267:108957,2024)。天富平台为本论文的第一完成单位和通讯单位🧘🏻♀️💁♀️,之江实验室和上海市力学信息学前沿科学研究基地为本论文的共同通讯单位,21级博士生马家轩为第一作者🔲,张统一院士和孙升研究员为共同通讯作者。
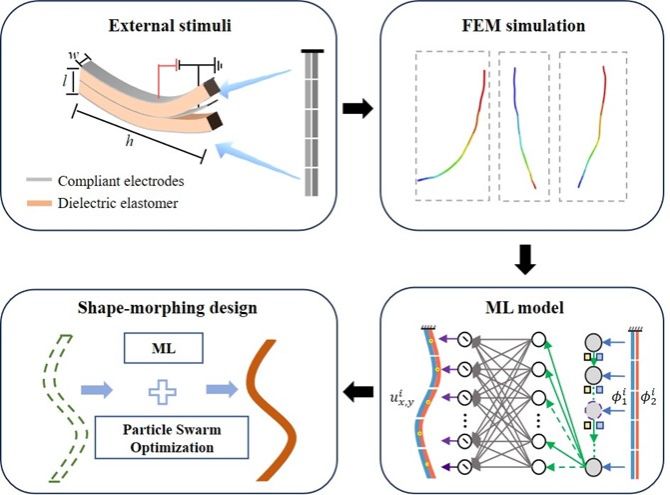
图1. 介电柔性梁的致动形状逆向设计数据驱动框架
软体机器人具有极好的柔顺性👨🏽🍳,在复杂环境探索、柔性电子皮肤和智慧健康医疗等方面具有巨大的应用前景🎸。但无限的变形自由度使得致动激励的设计极具挑战性🤾🏻♀️👷🏼♂️。张统一院士在国内最早提出的(材料)力学信息学的研究范式🤘🏽,为软体机器人致动激励的设计提供了新的解决思路。
本工作借鉴自然界中兽群通过单体相互作用实现宏观“涌现”能力的现象,提出多点激励实现介电弹性体按需变形的方法,通过融合力电耦合大变形有限元模拟🤜、神经网络代理模型和启发式算法👨🏿🦱,提出了确定软体机器人目标致动形状外加激励的数据驱动方法🫄🏻。
该研究首先通过有限元仿真建立介电柔性梁的外部激励和致动变形空间坐标的数据库👬🏻,基于长短期记忆神经网络(LSTM)和全连接神经网络(FCNN)提取介电柔性梁的空间特征,捕捉外部激励和致动变形空间坐标的非线性映射关系,最后嵌入到粒子群(PSO)算法中进行目标形状的逆向设计。工作展示了对于长度分为80mm, 120mm和160mm的柔性介电梁的致动形状逆向设计结果,表明提出的数据驱动方法具有良好的泛化能力。此研究提出的柔性梁致动形状逆向设计算法可以扩展到不同驱动激励类型的智能材料,有望进一步加速软体机器人的发展应用。
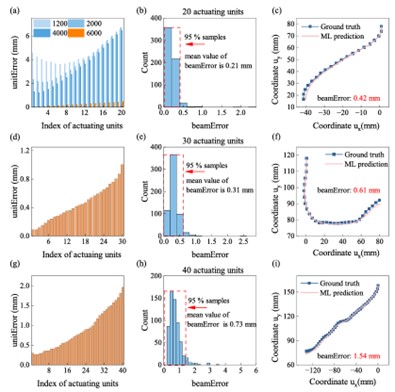
图2🎈:LSTM-FCNN模型对长度为80 mm、120 mm和160 mm介电柔性梁的预测结果
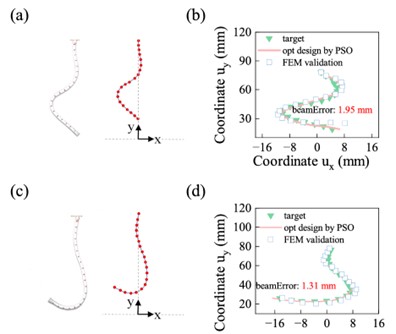
图3:人为摆出的介电柔性梁的致动变形逆向设计结果
该工作得到了国家重点研发计划(编号:2022YFB3707803)👘、国家自然科学基金项目(编号:12072179)和之江实验室重点研发项目(编号:2021PE0AC02)的资助。
文章链接🏂:https://doi.org/10.1016/j.ijmecsci.2023.108957